
आवेदन विवरण
RT7 और RT4 V4 के लिए Raymarine तत्व ऐप के साथ संयोजन में Carplounge ऑटोपायलट, आपके बैटबोट को नियंत्रित करने के तरीके को बदल देता है। एक पारंपरिक रिमोट कंट्रोल पर भरोसा करने के बजाय, यह अभिनव प्रणाली एक एंड्रॉइड टैबलेट या स्मार्टफोन का उपयोग करती है, जो अधिक सहज और सुविधा-समृद्ध इंटरफ़ेस की पेशकश करती है। आवश्यक सॉफ़्टवेयर Google Play Store पर मुफ्त में उपलब्ध है और ब्लूटूथ कनेक्टिविटी से लैस किसी भी Android डिवाइस के साथ संगत है। एक समर्पित ट्रांसमीटर बॉक्स का उपयोग करके ब्लूटूथ के माध्यम से नाव से टैबलेट को कनेक्ट करके, बैटबोट का पूर्ण नियंत्रण टचस्क्रीन इंटरफ़ेस के माध्यम से सीधे सुलभ हो जाता है।
मैनुअल मोड: अपनी उंगलियों पर पूर्ण नियंत्रण
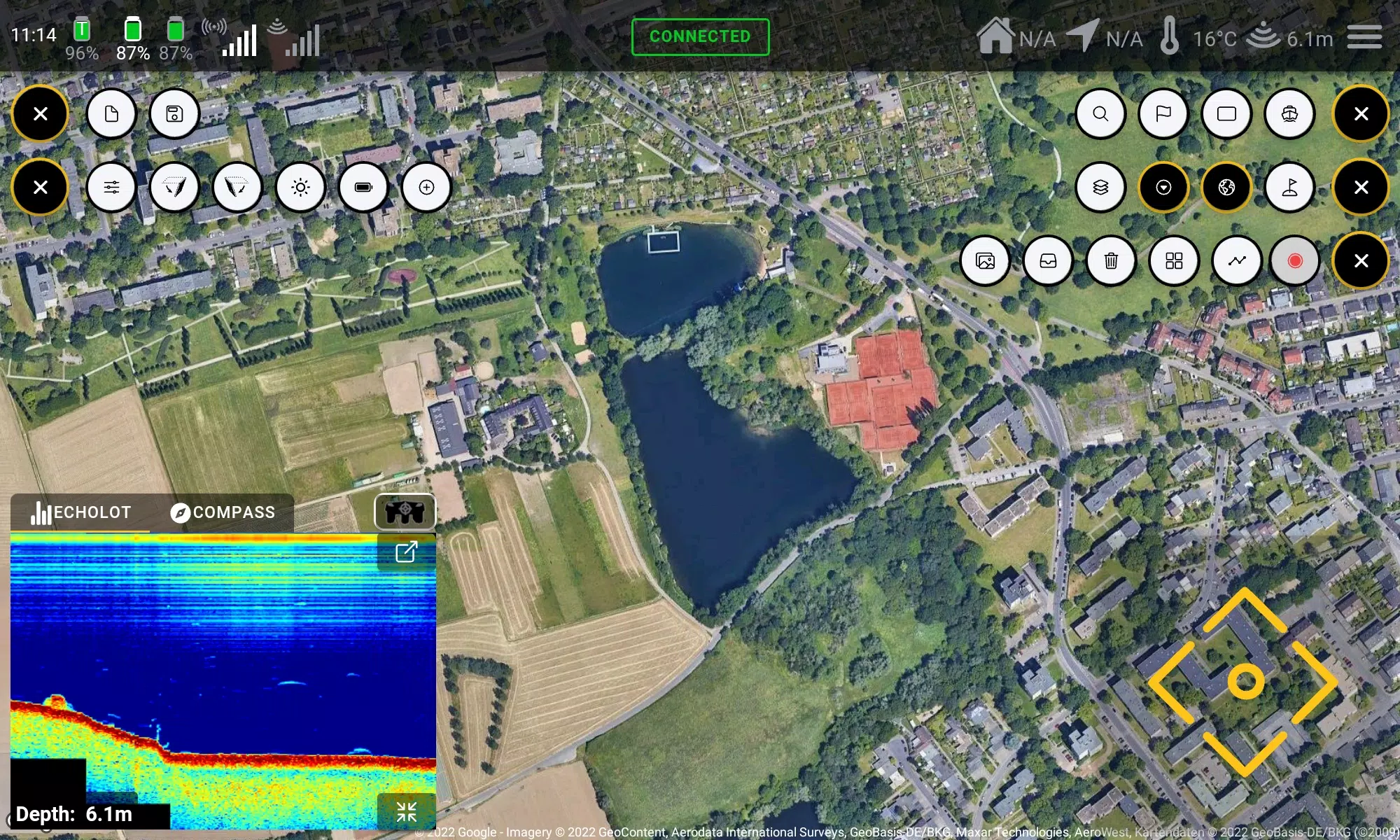
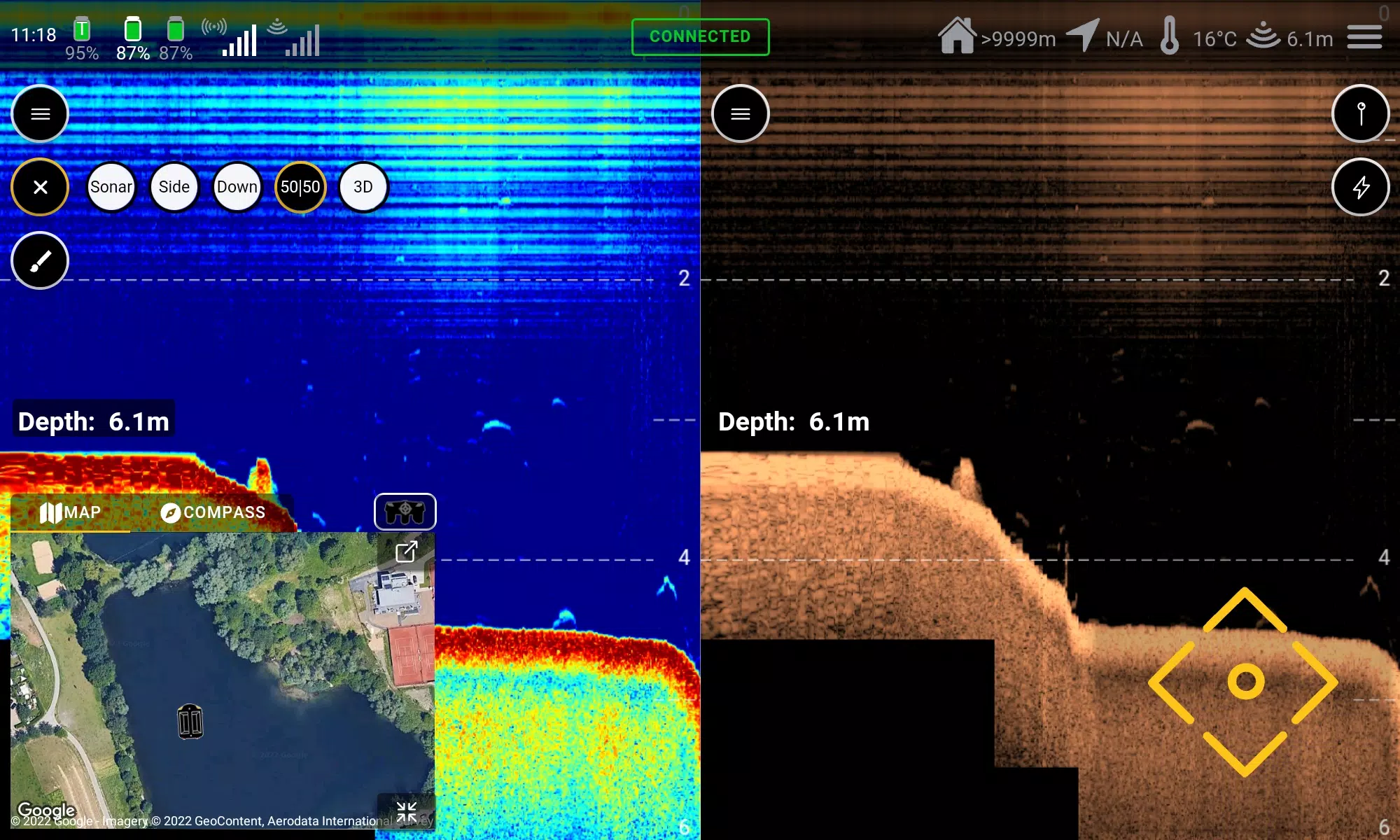
मैनुअल मोड में, बैटबोट एक पारंपरिक मॉडल की तरह ही संचालित होता है, जिससे आप टच स्क्रीन का उपयोग करके इसे चलाने की अनुमति देते हैं। रियल-टाइम पोजिशनिंग, रूट ट्रैकिंग और कम्पास ओरिएंटेशन एक इंटरैक्टिव मैप पर प्रदर्शित किए जाते हैं, जो नाव के चलते समय लगातार अपडेट करता है। अंतर्निहित जीपीएस कार्यक्षमता के लिए धन्यवाद, उपयोगकर्ता प्रमुख मछली पकड़ने के स्थानों को चिह्नित और नाम दे सकते हैं-जैसे कि "जेटी लेफ्ट", "स्पॉट 1", या "होम"-एक इको साउंडर से निष्कर्षों पर आधारित, भविष्य के नेविगेशन को इन स्पॉट को सहज बना देता है।
ऑटोपायलट मोड: परिशुद्धता मार्ग योजना
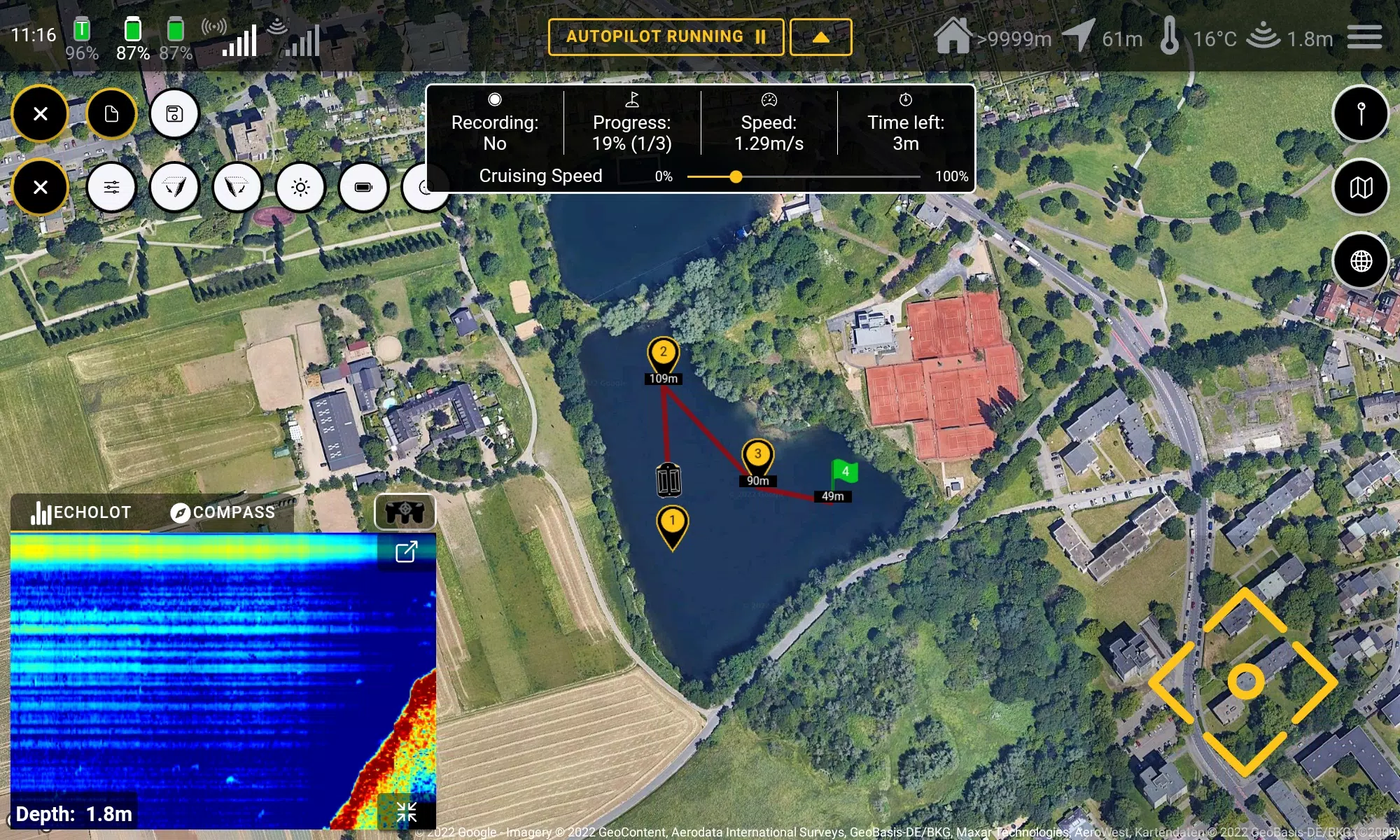
ऑटोपायलट मोड पर स्विच करें, कई वेपॉइंट्स का चयन और संयोजन करके कस्टम मार्गों को बनाने के लिए, प्रत्येक विशिष्ट क्रियाओं के साथ - जैसे कि हॉपर (बाएं/दाएं) को खोलने, रिलीज़ को तैनात करना, या ऑनबोर्ड लाइट को सक्रिय करना। उदाहरण के लिए:
- 1.) "सैंडबैंक" पर नेविगेट करें - आगमन पर, सही हॉपर खोलें
- 2.) "स्पॉट 2" के लिए आगे बढ़ें - एक बार वहाँ, बाएं हॉपर खोलें
- 3.) एक प्रकाश पलक के साथ शुरुआती बिंदु और सिग्नल पूरा होने पर लौटें
एक बार प्रोग्राम किए जाने के बाद, नाव स्वायत्त रूप से निर्दिष्ट मार्ग का अनुसरण करती है। सटीक और दोहराए जाने वाले मिशन को सक्षम करते हुए, मार्गों और मार्गों की एक व्यापक संख्या संग्रहीत की जा सकती है। उन्नत माप प्रौद्योगिकियों का उपयोग करना- जीपीएस, कम्पास, स्थिति और त्वरण सेंसर सहित-सिस्टम अत्यधिक सटीक मार्ग मार्गदर्शन प्राप्त करता है, लगभग 90% मामलों में उप -30 सेमी सटीकता प्रदान करता है।
स्मार्ट लाइन तनाव प्रबंधन
एक स्टैंडआउट फीचर इंटेलिजेंट लाइन टेंशनिंग सिस्टम है। जब एक या दो छड़ को एक साथ अलग -अलग स्थानों पर तैनात किया जाता है, तो जहाज पर इलेक्ट्रॉनिक्स लाइन तनाव का पता लगाते हैं और स्वचालित रूप से स्टीयरिंग को पुल बलों का प्रतिकार करने के लिए समायोजित करते हैं। यह सुनिश्चित करता है कि नाव अनावश्यक मोड़ के बिना अपने लक्ष्य की ओर एक सीधा पाठ्यक्रम बनाए रखती है, लाइन टेंगल्स को कम करती है और चारा प्लेसमेंट सटीकता में सुधार करती है।
लचीला नियंत्रण विकल्प
जबकि Carplounge ऑटोपायलट मानक रिमोट कंट्रोल को बदल देता है, हम एक भौतिक रिमोट के साथ एकीकरण का भी समर्थन करते हैं। यह दोहरी-नियंत्रण विकल्प उपयोगकर्ताओं को अपने एंड्रॉइड टैबलेट के माध्यम से नाव के संचालन के बीच चुनने या हैंडहेल्ड कंट्रोलर का उपयोग करने की स्वतंत्रता देता है। ब्लूटूथ क्षमता वाले सभी एंड्रॉइड टैबलेट संगत हैं, हालांकि हमारा ऐप वर्तमान में 10-इंच उपकरणों के लिए अनुकूलित है। डायरेक्ट टचस्क्रीन कंट्रोल ने बैटबोट को सहज और उत्तरदायी दोनों तरह से पायलट किया।
अपडेट के माध्यम से निरंतर सुधार
चूंकि Carplounge ऐप को मुफ्त में पेश किया जाता है और Google Play Store पर उपलब्ध है, हम नियमित रूप से नियमित अपडेट वितरित कर सकते हैं। इन अपडेट में नई सुविधाएँ, संवर्द्धन और बग फिक्स शामिल हैं - सभी हार्डवेयर रिटर्न या अतिरिक्त इंस्टॉलेशन की आवश्यकता के बिना। मानक मोबाइल ऐप्स की तरह, अपडेट स्वचालित रूप से होते हैं, यह सुनिश्चित करना कि आपका सिस्टम नवीनतम क्षमताओं के साथ अप-टू-डेट बना रहे।
अनुकूलता
इस प्रणाली को विशेष रूप से [TTPP] और [YYXX] के साथ उपयोग के लिए डिज़ाइन किया गया है।
संस्करण 3.9.8 में नया क्या है
अंतिम अद्यतन: 20 अक्टूबर, 2024
- तय:
- 5 से अधिक वेपॉइंट वाले मार्गों या रेखापियों को प्रभावित करने वाले एक मुद्दे को हल किया
- विभिन्न सामान्य बग फिक्स
- बदल गया:
- उपयोगकर्ता अब सहेजे गए बिंदुओं को संपादित करते समय लेबल का प्रबंधन कर सकते हैं
- सभी डेटा फ़ील्ड को अब वेपॉइंट बनाते या संशोधित करते समय संपादित किया जा सकता है
स्क्रीनशॉट
Reviews
Post Comments
नवीनतम लेख

Chronomon Stardew Valley और Palworld को मोबाइल RPG साहसिक के लिए मिश्रित करता है
Chronomon, Stardew Valley और Palworld के तत्वों को एक नए मोबाइल रिलीज में जोड़ता है राक्षसों को पकड़ें और उनके साथ लड़ें, फिर खेती की गतिविधियों के साथ आराम करें अपने मूड के आधार पर तीव्र

Boom Blast के लिए सबसे मजबूत नायकों की टियर लिस्ट (2025)
Boom Blast एक रोमांचक एक्शन-रणनीति गेम है जो विस्फोटक युद्ध को बिजली की गति से रिफ्लेक्स चुनौतियों के साथ जोड़ता है, जो एक जीवंत, कार्टून-शैली के ब्रह्मांड में लिपटा हुआ है। खिलाड़ी विचित्र पात्रों की

आकर्षक निष्क्रिय खेल: प्यारे प्राणियों के साथ औषधि बनाएं
विची वर्कशॉप: कोज़ी निष्क्रिय अब वैश्विक स्तर पर Android पर लॉन्च हो गया है। इंडी टीम डेड रॉक स्टूडियो द्वारा विकसित, यह रमणीय खेल आकर्षण, औषधि निर्माण, और प्यारे जादुई प्राणियों के समूह से भरा हुआ है
Orna ने पर्यावरण चेतना को बढ़ावा देने के लिए Terra's Legacy लॉन्च किया
क्या आपने Orna, Northern Forge Studios द्वारा बनाए गए फंतासी RPG और GPS MMO को खोजा है? यह गेम वास्तविक दुनिया पर प्रभाव डालने वाली एक अनूठी इन-गेम घटना के लिए तैयार हो रहा है। Orna ने पर्यावरण प्रदूष
Amazon ने वैश्विक स्तर पर Pokémon TCG स्टॉक को बढ़ाया कमी को दूर करने के लिए
यदि आप Pokémon Trading Card Game के कट्टर प्रशंसक हैं, तो आप जानते हैं कि रीस्टॉक होने पर कितना रोमांच होता है। 2025 में, उपलब्धता में अप्रत्याशित वृद्धि ने सभी को चौंका दिया है। जबकि हर कोई Prismatic

2025 में सभी Scream मूवीज़ ऑनलाइन स्ट्रीम करें: कहाँ देखें
Scream फ्रैंचाइज़ आधुनिक हॉरर सिनेमा का एक आधारशिला है, जो रीढ़-हैरान करने वाली सस्पेंस, तेज़ गहरे हास्य और जटिल रहस्य को शानदार ढंग से मिश्रित करता है। Scream 6 के रिलीज़ के साथ, यह सीरीज़ स्लैशर शैल
Carplounge V4 Autopilot जैसे ऐप्स

WoW Books
पुस्तकालय एवं डेमो丨37.7 MB


TB Rorschach
पुस्तकालय एवं डेमो丨15.0 MB

FFF skin tool
पुस्तकालय एवं डेमो丨29.4 MB


Apkgw
पुस्तकालय एवं डेमो丨20.1 MB
Catholic Bible app
पुस्तकालय एवं डेमो丨26.0 MB

Mod Menu For RBX
पुस्तकालय एवं डेमो丨27.3 MB
नवीनतम ऐप्स

EnCue
कला डिजाइन丨83.3 MB




advanGO
पुस्तकालय एवं डेमो丨45.7 MB

Perfect365 SoReal AI
फोटोग्राफी丨176.9 MB


Body Fitness
फैशन जीवन।丨6.90M








शीर्ष समाचार
अधिक +


01
11-17
हॉगवर्ट्स लिगेसी 2 डब्ल्यूबी गेम्स के लिए "सबसे बड़ी प्राथमिकताओं में से एक" है
इस सप्ताह क्विडडिच चैंपियंस के सफल लॉन्च के बाद, वार्नर ब्रदर्स डिस्कवरी ने पिछले साल के हैरी पॉटर-आधारित एक्शन आरपीजी हिट हॉगवर्ट्स लिगेसी-2023 के सबसे ज्यादा बिकने वाले गेम की अगली कड़ी के लिए अपनी योजना की पुष्टि की है। वार्नर ब्रदर्स द्वारा हॉगवर्ट्स लिगेसी सीक्वल योजनाओं की पुष्टि की गई। डिस्कवरीअपेक्षित में
02
01-06
सीडीपीआर ने द विचर 3 में कमजोर गेमप्ले को स्वीकार किया
समीक्षकों द्वारा प्रशंसित होने के बावजूद, द विचर 3 अपनी खामियों से रहित नहीं था। कई प्रशंसकों को लगा कि युद्ध प्रणाली कमज़ोर पड़ गई है।
हाल ही में एक साक्षात्कार में, विचर 4 के गेम डायरेक्टर, सेबेस्टियन कलेम्बा ने पिछले गेम के गेमप्ले में कमजोरियों को स्वीकार किया, विशेष रूप से महत्वपूर्ण सुधार की आवश्यकता पर प्रकाश डाला।
03
11-11
सर्वश्रेष्ठ एंड्रॉइड एमएमओआरपीजी
एमएमओआरपीजी मोबाइल पर सबसे लोकप्रिय शैलियों में से एक है, और यह देखना आसान है कि क्यों। शैली को काफी हद तक ग्राइंड द्वारा परिभाषित किया गया है, और मोबाइल ने आपके गेमिंग डिवाइस को हर जगह ले जाने की क्षमता के कारण इसे और अधिक स्वादिष्ट बना दिया है, चाहे वह शौचालय हो या एक महत्वपूर्ण कार्य बैठक
04
11-16
हवाई जहाज़ के रसोइये बोर्ड पर बेहतरीन नाश्ता, प्रिंगल्स लेकर आए हैं!
कुछ स्नैक्स के लिए कमर कस लें क्योंकि नॉर्डकरंट ने अपने खाना पकाने के खेल के लिए एक रोमांचक कार्यक्रम जारी किया है। यह एयरप्लेन शेफ्स और प्रिंगल्स का सबसे अप्रत्याशित सहयोग है। यदि आप एक फ्लाइट अटेंडेंट के रूप में अपने आभासी जीवन का आनंद ले रहे हैं, तो चीजें बहुत स्वादिष्ट होने वाली हैं। पी के पीछे गेम डेवलपर
05
11-16
Play Together सैनरियो के साथ सहयोग करने और नई माई मेलोडी और कुरोमी सामग्री पेश करने के लिए
प्ले टुगेदर अपने सैनरियो कोलाब को माई मेलोडी और कुरोमी की उपस्थिति के साथ वापस ला रहा है। आप उनके थीम वाले मिशनों को पूरा करके सिक्के एकत्र कर सकते हैं, जिनका उपयोग विशेष वस्तुओं को खींचने के लिए किया जा सकता है। बोनस के रूप में नई ग्रीष्मकालीन-थीम वाली सामग्री और कार्यक्रम भी हैं, जिसमें एक प्रमुख बग हंटप्ले भी शामिल है। एक साथ, वां
विषय
अधिक +

