
애플리케이션 설명
RT7 & RT4 V4 용 Raymarine 요소 앱과 함께 Carplounge Autopilot은 미끼 보트를 제어하는 방식을 변형시킵니다. 이 혁신적인 시스템은 전통적인 원격 제어에 의존하는 대신 안드로이드 태블릿 또는 스마트 폰을 사용하여보다 직관적이고 기능이 풍부한 인터페이스를 제공합니다. 필요한 소프트웨어는 Google Play 스토어에서 무료로 제공되며 Bluetooth 연결이 장착 된 Android 장치와 호환됩니다. 전용 송신기 상자를 사용하여 블루투스를 통해 태블릿을 보트에 연결함으로써 터치 스크린 인터페이스를 통해 베이트 보트의 전체 제어가 직접 접근 할 수있게됩니다.
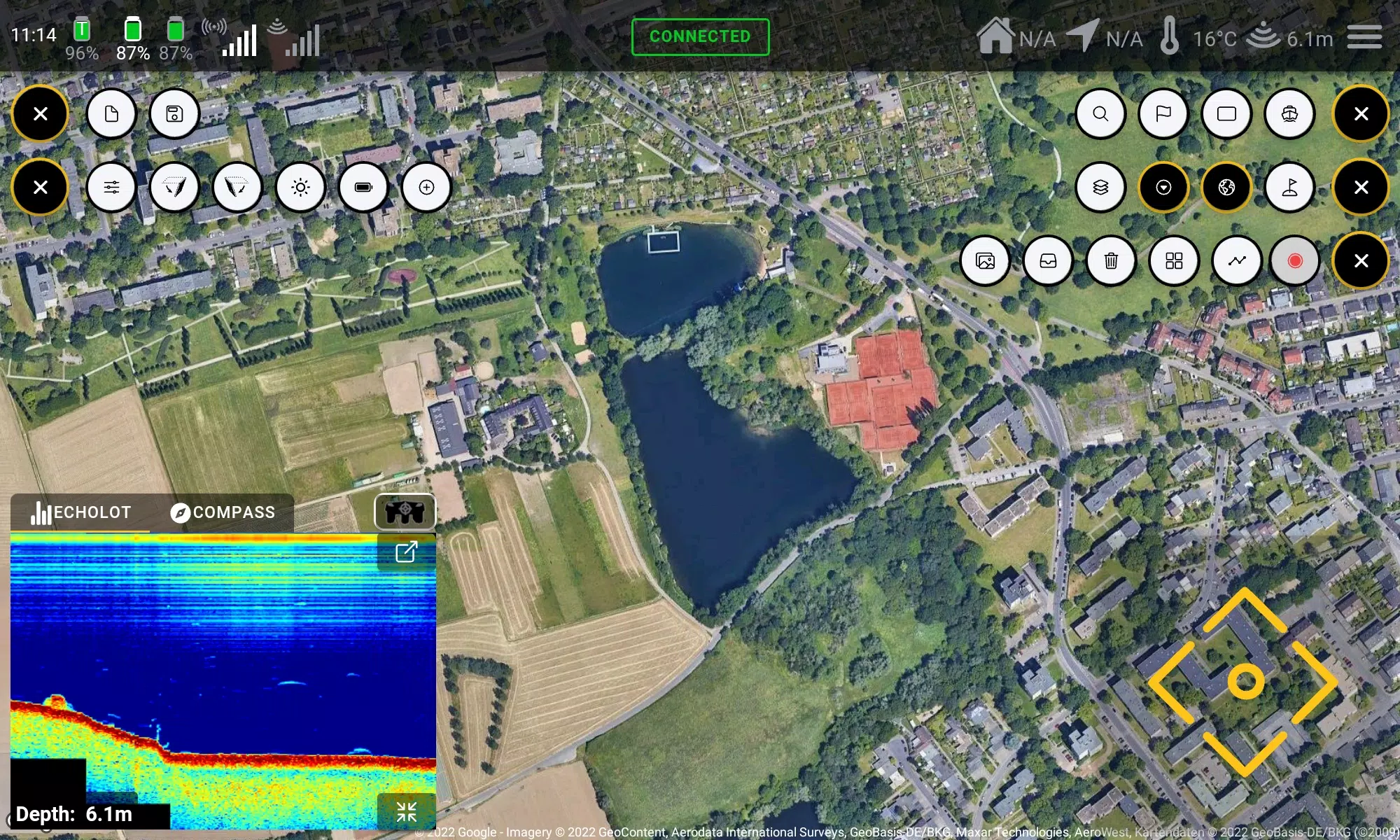
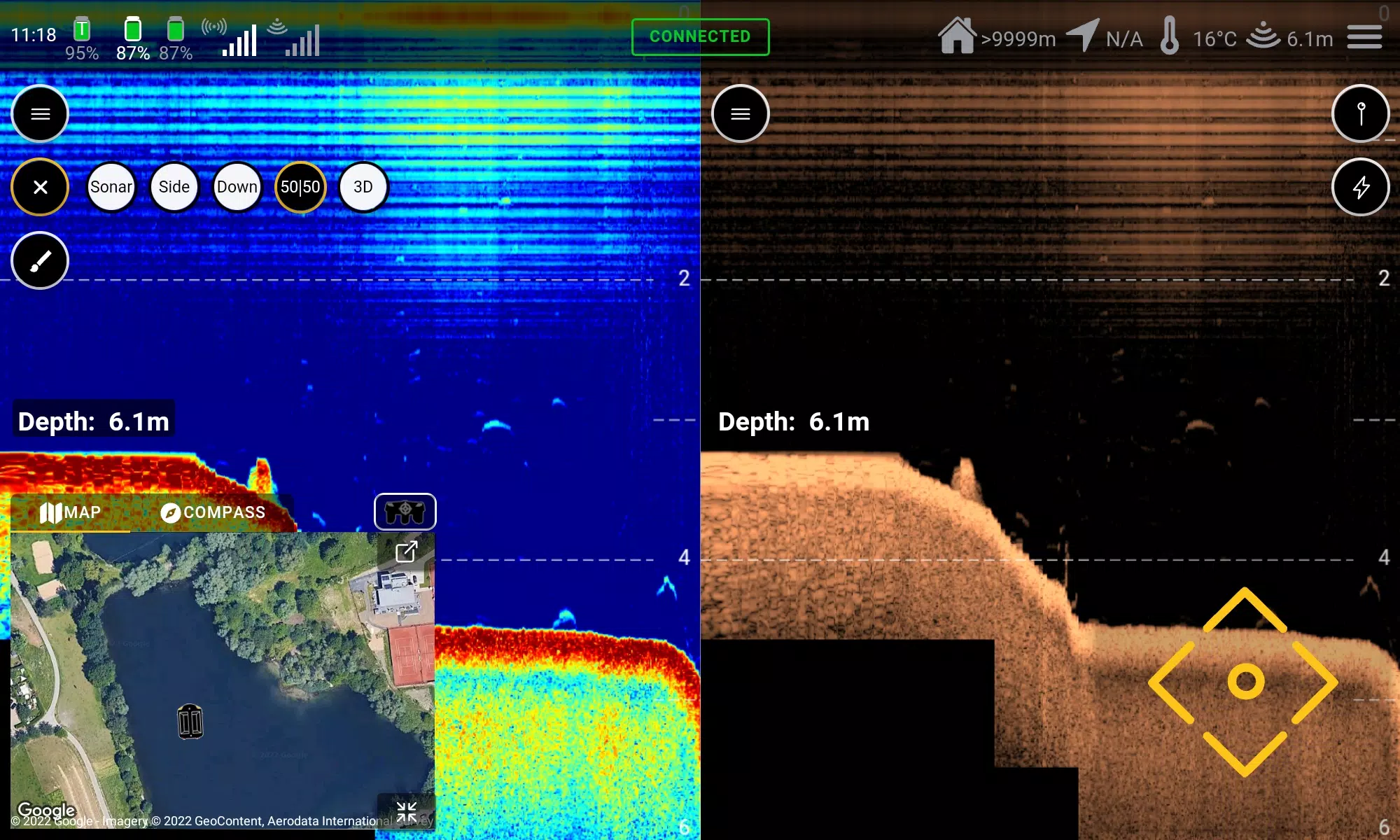
수동 모드 : 손가락 끝의 전체 제어
수동 모드에서, 미끼 보트는 기존 모델처럼 작동하므로 터치 스크린을 사용하여 조종 할 수 있습니다. 실시간 포지셔닝, 경로 추적 및 나침반 방향은 대화식 맵에 표시되며 보트가 움직일 때 지속적으로 업데이트됩니다. 내장 GPS 기능 덕분에 사용자는 "Jetty Left", "Spot 1"또는 "Home"과 같은 주요 낚시 위치를 표시하고 이름을 지정할 수 있습니다.
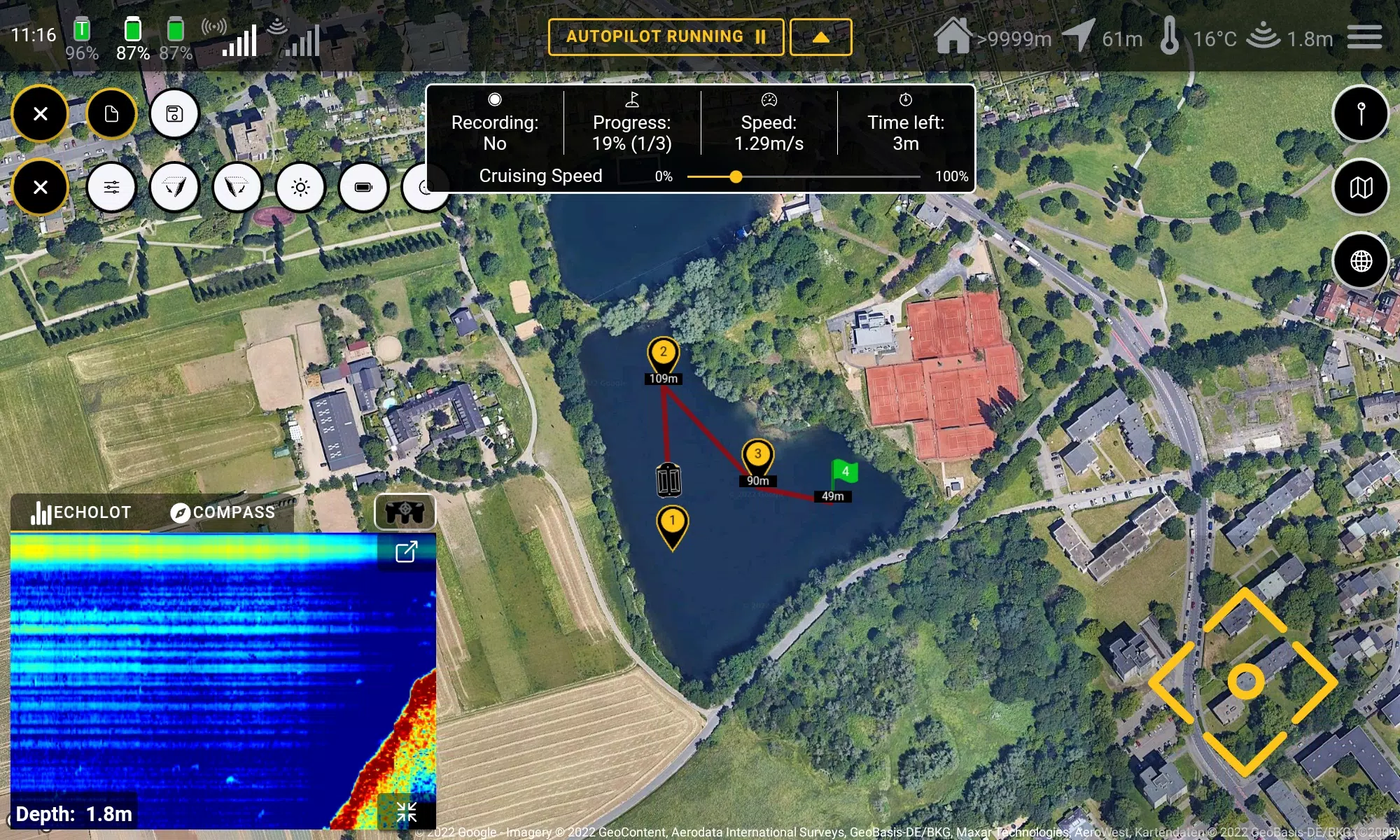
자동 조종 장치 모드 : 정밀 경로 계획
오토 파일럿 모드로 전환하여 여러 웨이 포인트를 선택하고 결합하여 각각 특정 작업이 할당 된 호퍼 (왼쪽/오른쪽)와 같은 특정 작업을 선택하고 결합하여 사용자 정의 경로를 만듭니다. 예를 들어:
- 1.) "SandBank"로 이동 - 도착하면 오른쪽 호퍼를 엽니 다.
- 2.) "Spot 2"로 진행하십시오 - 일단 거기에 있으면 왼쪽 호퍼를 엽니 다.
- 3.) 시작점으로 돌아가 빛 깜박임으로 신호 완료
일단 프로그래밍되면 보트는 지정된 경로를 자율적으로 따릅니다. 광범위한 수의 웨이 포인트와 경로를 저장하여 정확하고 반복 가능한 임무를 수행 할 수 있습니다. GP, Compass, Position 및 Acceleration Sensor를 포함한 고급 측정 기술을 사용하여 시스템은 매우 정확한 경로 안내를 달성하여 약 90%의 사례에서 30cm 이하의 정밀도를 제공합니다.
스마트 라인 장력 관리
눈에 띄는 기능 중 하나는 지능형 라인 텐션 시스템입니다. 하나 또는 두 개의로드를 다른 지점에 동시에 배치 할 때, 온보드 전자 장치는 라인 장력을 감지하고 자동으로 조정하여 풀 힘을 대응합니다. 이를 통해 보트는 불필요한 회전없이 목표를 향한 직선 코스를 유지하여 선 엉킴을 최소화하고 미끼 배치 정확도를 향상시킵니다.
유연한 제어 옵션
Carplounge Autopilot은 표준 리모컨을 대체하지만 실제 리모컨과의 통합도 지원합니다. 이 듀얼 제어 옵션은 사용자가 안드로이드 태블릿을 통해 보트 작동 또는 핸드 헬드 컨트롤러를 사용하는 중에서 자유롭게 선택할 수 있습니다. Bluetooth 기능이 장착 된 모든 Android 태블릿은 호환되지만 앱은 현재 10 인치 장치에 최적화되어 있습니다. 직접 터치 스크린 컨트롤은 베이트 보트를 직관적이고 반응 적으로 조종합니다.
업데이트를 통한 지속적인 개선
CarPlounge 앱은 무료로 제공되며 Google Play 스토어에서 제공되므로 정기적으로 업데이트를 원활하게 제공 할 수 있습니다. 이러한 업데이트에는 하드웨어 반환 또는 추가 설치 없이도 새로운 기능, 향상 및 버그 수정이 포함됩니다. 표준 모바일 앱과 마찬가지로 업데이트가 자동으로 발생하여 시스템이 최신 기능을 사용하여 최신 상태를 유지하도록합니다.
호환성
이 시스템은 [TTPP] 및 [YYXX]와 함께 사용하도록 특별히 설계되었습니다.
버전 3.9.8의 새로운 기능
마지막 업데이트 : 2024 년 10 월 20 일
- 결정된:
- 5 개 이상의 웨이 포인트를 포함하는 경로 또는 래스터에 영향을 미치는 문제를 해결했습니다.
- 다양한 일반적인 버그 수정
- 변경 :
- 이제 저장된 포인트를 편집하면서 레이블을 관리 할 수 있습니다
- WayPoint를 작성하거나 수정할 때 모든 데이터 필드를 편집 할 수 있습니다.
스크린샷
리뷰
댓글 게시
최신 기사

요테이 고스트 시네마틱 필터로 게임 분위기 커스터마이징
‘요테이의 유령(Ghost of Yōtei)’은 게임 내 시각적 필터와 모드를 통해 클래식 사무라이 영화의 느낌을 자아내도록 설계되었으며, 깊이 있는 몰입감을 제공합니다. 이 게임이 어떻게 생생하고 시네마틱한 모험을 만들어내는지 더 자세히 알아보세요.요테이의 유령, 클래식 사무라이 영화에 귀 기울이다당신의 손끝에서 즐기는 일본식 시네마틱 스타일 ‘쓰시마의 유령’의 후속작인 ‘요테이의 유령’은 완전히 커스터마이징 가능한 시네마틱 경험을 선사하는
발매일 아마존에서 'MTG: 에지 오브 엣터니티' 완판
마법: 집합의 팬들은 블라인드 이터니티를 통한 여정을 손꼽아 기다려 왔으며, 드디어 그 순간이 도래했습니다. 에지 오브 이터니티가 오늘 전 세계적으로 정식 출시되며, 전통적으로 땅에 기반한 고전 판타지 설정을 가진 클래식 트레이딩 카드 게임에 우주 규모의 판타지를 가져왔습니다.하지만 아마존에서 부스터 팩을 구매할 계획이었다면 빠르게 행동하십시오 - 차원 사이를 오가는 플레인즈워커보다 더 빨리 품절되고 있습니다.마법: 집합 에지 오브 이터니티 -

레고 스파이더-버스 미니피규어 사전 예약 가능
LEGO는 이번 시즌 흥미로운 신제품 세트를 출시하고 있지만, 미니피규어 컬렉션을 확장하는 것만을 원한다면 다음 달에 즐거운 surprises가 기다리고 있습니다. 9월 1일부터 레고는 스파이더맨: 어크로스 더 스파이더버스 미니피규어 블라인드 박스를 발매합니다.각 팩에는 총 12명의 캐릭터 중 무작위로 선택된 여섯 명의 스파이더맨: 어크로스 더 스파이더버스 미니피규어가 포함되어 있습니다. 스파이더맨 팬들은 현재 아마존과 레고 스토어에서 이 세트

스핀 리듬 XD, 크런치롤 게임 밸트에서 곧 모바일로 출시 예정
Fruit Ninja, Jetpack Joyride, Steppy Pants 등의 타이틀로 개발사 Super Spin Digital를 알고 계실 것입니다. 그들의 또 다른 인기작인 리듬 게임 의 성공은 2024년 PC와 콘솔에 출시된 후속작 의 길을 열었습니다. 이제 그들은 Crunchyroll을 통해 를 모바일로 가져오고 있습니다.기술적으로 보면, 이 리듬 게임 시리즈가 모바일에 처음 등장한 것은 아닙니다. 은 이전에 Habby의 레이블로 A
엘든 링, 나이트레인의 아이템 공유를 용이하게 하는 글치 발견
Elden Ring Nightreign에는 몇 가지 놀라운 장비 드롭이 있습니다. 때로는 이 장비를 다른 사람과 공유하면서도 자신도 그대로 유지하고 싶을 수 있습니다. 다행히도 장비 복제 글리치가 있어 익스플로잇이 유효한 동안은 최소한 이 전리품을 공유하는 것이 가능합니다.저는 이를 PC Gamer를 통해 처음 알게 되었는데, 그들은 복제를 수행하는 방법에 대한 간결한 가이드를 게시했습니다. 과정은 매우 간단합니다: 두 플레이어가 같은 무기를

학도의 도주에서 은밀 전술 습득하기
스쿨보이 런어웨이 – 스텔스는 학생이 책을 읽는 대신 도망치는 것을 더 좋아하는 역동적인 스트리밍 게임을 제공합니다. 조용히 부모의 감시를 피해, 현명한 전략과 일상용품을 활용해 탈출을 완성하세요.스쿨보이 런어웨이 – 스텔스는 소규모 캐릭터 세트를 사용하지만, 각 캐릭터의 역할을 이해하는 것이 성공의 핵심입니다. 이 블루스택 캐릭터 가이드는 초보자 가이드와 고급 팁과 함께, 당신의 스트리밍 전략을 더욱 강화해 줍니다.캐릭터 1 – 학생작은 역할
Carplounge V4 Autopilot 같은 앱

WoW Books
라이브러리 및 데모丨37.7 MB


TB Rorschach
라이브러리 및 데모丨15.0 MB
Catholic Bible Offline
라이브러리 및 데모丨26.4 MB

FFF skin tool
라이브러리 및 데모丨29.4 MB

EMKA Smart Access Key
라이브러리 및 데모丨47.6 MB

Apkgw
라이브러리 및 데모丨20.1 MB
Catholic Bible app
라이브러리 및 데모丨26.0 MB

Mod Menu For RBX
라이브러리 및 데모丨27.3 MB
최신 앱

Учи.ру 0–4 класс
교육丨12.8 MB


Lgbtqia+ Chat: LGBT Dating
통신丨7.40M



Epoxy Resin Art Ideas
예술 디자인丨41.0 MB
Lola Casademunt
쇼핑丨6.8 MB

Anime Chicken
도구丨38.90M

WashAssist Dashboard
패션 라이프丨11.70M







주요 뉴스
더 +


01
01-06
CDPR은 The Witcher 3의 약한 게임 플레이를 인정했습니다.
Witcher 3는 비평가들의 호평을 받았지만 결함이 없던 것은 아닙니다. 많은 팬들은 전투 시스템이 부족하다고 느꼈습니다.
최근 인터뷰에서 Witcher 4의 게임 디렉터인 Sebastian Kalemba는 이전 게임 게임 플레이의 약점을 인정하고 특히 상당한 개선의 필요성을 강조했습니다.
02
01-07
속보: Flight Simulator 2024 로그인 Woes Ground Players
기술적인 문제로 어려움을 겪는 Flight Simulator 2024 출시
큰 기대를 모았던 Flight Simulator 2024의 출시는 광범위한 기술적 문제로 인해 상당한 방해를 받았으며, 많은 플레이어가 가상 하늘에 올라가기도 전에 접지 상태에 놓였습니다. 이 기사에서는 보고된 d에 대해 자세히 설명합니다.
03
11-17
Hogwarts Legacy 2는 WB Games의 "가장 큰 우선순위 중 하나"입니다.
이번 주 퀴디치 챔피언스의 성공적인 출시에 이어 워너 브라더스 디스커버리(Warner Bros. Discovery)는 2023년 베스트셀러 게임인 작년 해리포터 기반 액션 RPG 히트작 호그와트 레거시(Hogwarts Legacy)의 속편 계획을 확정했습니다. 워너 브라더스 디스커버리에서 호그와트 레거시 속편 계획 확정예상 ~에
04
11-16
비행기 요리사가 최고의 스낵인 프링글스를 기내에 가져왔습니다!
Nordcurrent가 방금 요리 게임을 위한 흥미진진한 이벤트를 열었으니 간식을 준비하세요. 비행기 요리사와 프링글스의 가장 예상치 못한 콜라보레이션입니다. 지금까지 승무원으로서 가상생활을 즐기고 계셨다면, 이제 상황이 훨씬 더 맛있어질 것입니다. p를 만든 게임 개발자
05
11-16
플레이투게더 산리오와 콜라보레이션, 새로운 마이멜로디와 쿠로미 콘텐츠 선보일 예정
Play Together는 My Melody와 Kuromi의 등장으로 Sanrio 콜라보레이션을 다시 선보입니다. 테마 미션을 완료하여 코인을 모아서 독점 아이템을 뽑을 수 있습니다. 보너스로 주요 벌레 사냥을 포함한 새로운 여름 테마 콘텐츠와 이벤트도 있습니다. 함께, 일

